
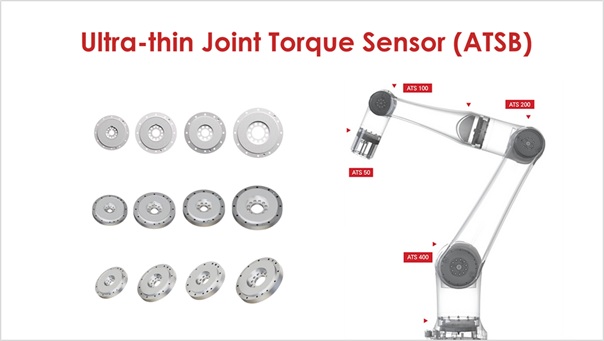
The AIDIN ROBOTICS ultra-thin joint torque sensor is designed to accurately measure the torque applied to robot joints. Its ultra-thin and compact design allows for seamless integration into robotic systems without adding significant bulk. This sensor enables precise collision detection and highly accurate torque control, making it ideal for advanced robotic applications that require both safety and performance. Its high sensitivity and reliability support smooth and responsive robotic motion, essential for collaborative and service robots.
Features of Ultra-thin Joint Torque Sensor:
- Ultra-thin and Compact Design
- The sensor is designed to be extremely thin, allowing easy integration into tight spaces within robotic joints without adding unnecessary bulk. This is especially valuable for compact or lightweight robots.
- High Torque Measurement Accuracy
- The sensor delivers precise torque readings, which are essential for applications requiring accurate force control, such as medical robots, collaborative robots (cobots), or high-precision assembly systems.
- Real-time Data Output
- The sensor provides torque data in real time, enabling immediate feedback for responsive control systems. This ensures smooth robot operation and fast reaction to environmental changes.
- High Sensitivity and Resolution
- Capable of detecting minute changes in force, the sensor supports delicate handling tasks, such as gripping fragile objects or adjusting pressure during contact.
- Strong and Durable Construction
- Built to withstand long operating hours and challenging industrial environments, ensuring long-term reliability and minimal maintenance.
- Wide Compatibility
- Can be used across different types of robots and actuators, making it a versatile component for a range of robotic applications.
Key Rolf of Joint torque sensor
- Role of the Joint Torque Sensor
- Torque sensors installed at each joint (motor) continuously measure the actual torque
- These readings are compared to the expected torque based on the robot’s planned trajectory.
- Abnormal Torque Detection
- A collision causes an unexpected external force, resulting in a sudden spike or abnormal pattern in torque.
- Example: If the robot arm hits a person’s arm, there will be a noticeable reactive torque.
- Real-Time Detection and Response
The controller detects this anomaly in real time and immediately:
- Stops the robot,
- Slows it down, or
- Moves it away (retreats),
If you are looking for ultra-thin joint torque sensors and robot motion sensors, you can find them at AIDIN ROBOTICS.
Click here if you are interested in AIDIN ROBOTICS products.
View more: Ultra-thin Robot Joint Torque Sensor

